正常歩行にみる3つのロッカー機能
heel rocker
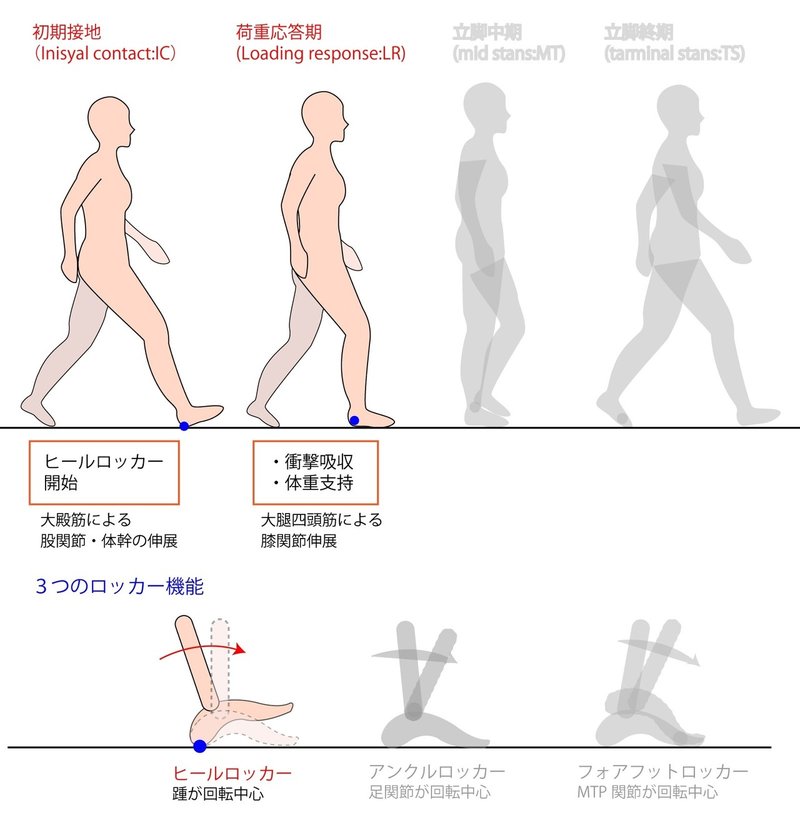
heel rockerは、踵を回転軸の中心とした制御機構です。その役割は、IC~LRでの重心の落下に対する衝撃吸収です。主に前脛骨筋や大腿四頭筋の遠心性収縮によって制御されます。
ankle rocker
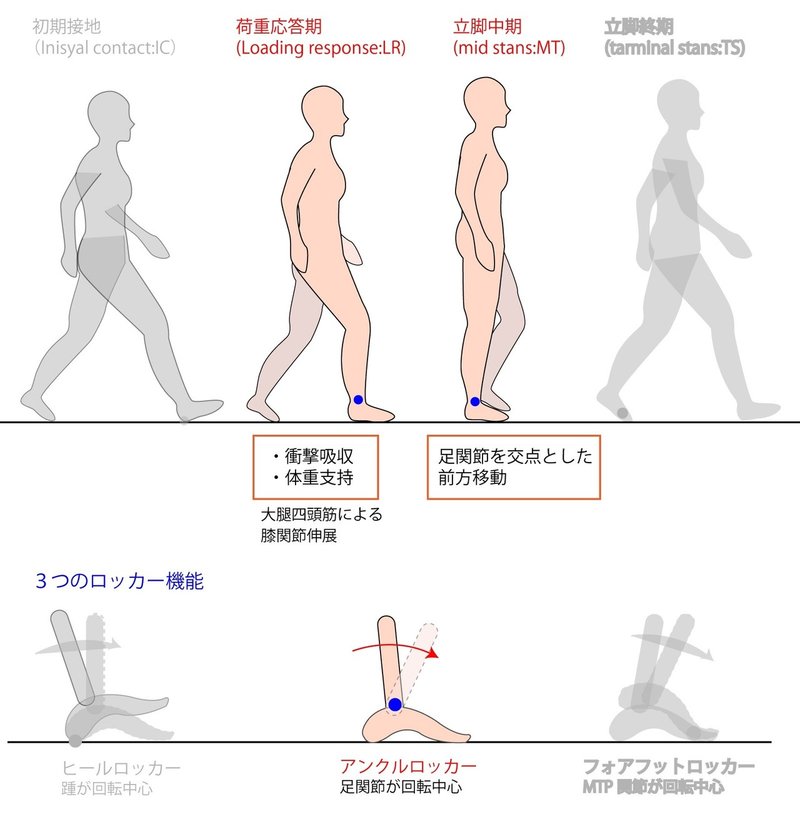
ankle rockerは、足関節を回転軸の中心とした制御機構です。その役割は、重心を上昇させるためのアクセルと前方への回転に対するブレーキです。前方への回転に対するブレーキは、主にヒラメ筋の遠心性収縮によって制御されます。
forefoot rocker
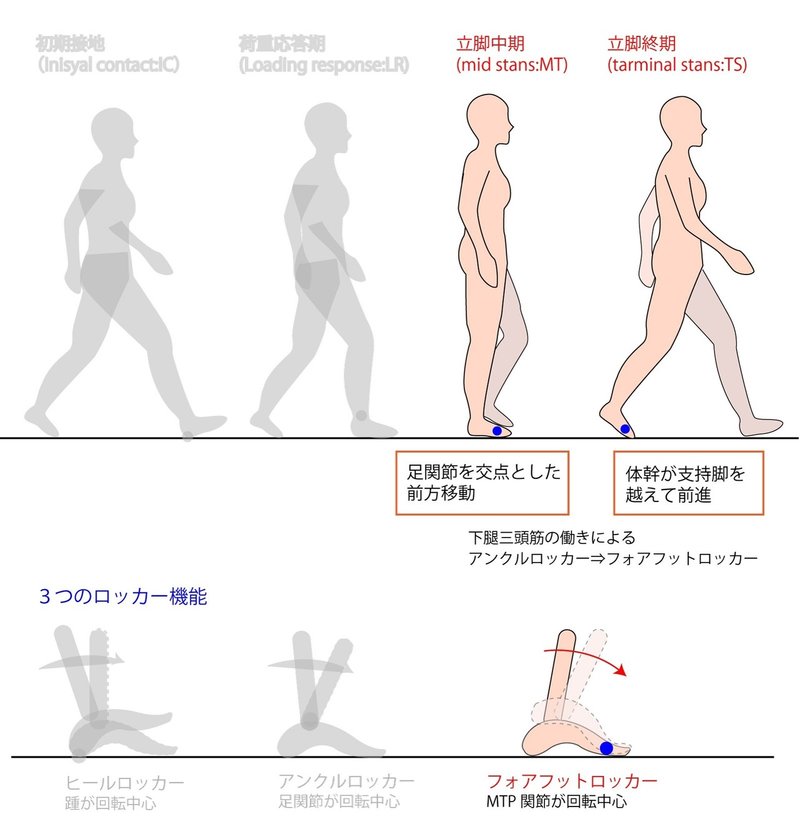
forefoot rockerは、回転軸の中心を足関節からMTP関節へ移動させて行う制御機構です。その役割は、前方への強い推進力と重心の下降を緩やかにする(ステップ長の確保)ことです。強力な腓腹筋の筋力が必要であり、最大筋力の60~80%を使っている²⁾とされています。